
 产品:14
产品:14
 联系我们
联系我们

本文介绍了工业机器人的诞生、发展及其应用领域,并对激光冲击强化技术做了详细介绍。 其次,针对KUKA公司的KR5arc型机器人,阐述了六自由度串联机器人的运动学和动力学分析。
通过齐次变换建立了机器人运动学模型,并对机器人正运动学和逆运动学分别进行了求解。利用矢量积法求得机器人的雅可比矩阵,建立了机器人末端的空间速度与各个扭转角速度之间存在的线性函数关系。利用三维建模软件Pro/E建立了机器人样机模型,并导入仿真软件ADAMS中对其进行了运动学仿真分析,使机器人的运动更直观化。利用拉格朗日法建立了机器人动力学方程,建立了关节位移、速度和加速度与驱动力矩或力的关系。 再次,用数值法和图解法求得六自由度串联机器人的工作空间,并介绍了机器人轨迹规划的一般性问题,主要阐述了轨迹规划的常用方法——插值法。介绍插值法后,在三维仿真软件ADAMS中进行了插值仿真,通过仿真预先了解机器人的运行情况。
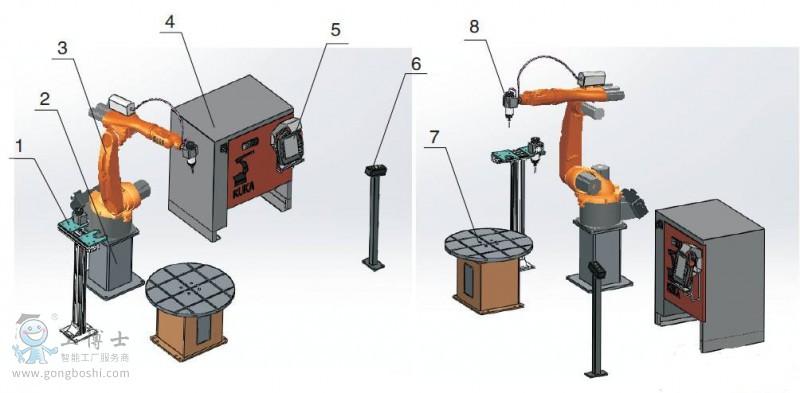
KUKA公司的KR5arc型机器人,对其系统内的世界坐标系、单轴坐标系、工具坐标系、Base坐标系及法兰盘坐标系作了详细介绍,并举一轨迹规划实例,为下面的激光冲击实验做好准备。 *后,做了激光冲击机械零件的模拟实验。零件选用具有代表性的飞机涡轮机叶片,因为涡轮机叶片是由一系列连续扭转曲面组成的不规则扇叶,所以确定曲面上某点的法线是一难点。本文采用逆向手段,用德国GOM公司的ATOSII扫描系统获得点云,简化点云后*后进行了叶片曲面的重构,获得叶片模型,并在Pro/E中测得该叶片上某点的法线。
实验中,用一激光器代替激光发射系统,用KR5arc型机器人来**定位涡轮机叶片的冲击区域。在机器人系统中建立了Base坐标系,并设定Base坐标系的z轴与激光束平行,然后在零件冲击点上建立一工具坐标系,且工具坐标系的z轴为该点的法线方向。利用机器人示教盒上的微动键操作机器人,使得工具坐标系与Base坐标系完全重合,*终使得该点的法向与激光束重合。为机器人调整叶片位姿,实现激光冲击强化涡轮机叶片周边强度,改善周边材料应力状态,提高其疲劳强度,延长叶片使用寿命成为可能。
了解更多机器人咨询请点击:www.kukapjlh.gongboshi.com